Главная » 2024»Февраль»27 » В японской лунной миссии впервые успешно задействованы «прыгающие» компактные автономные роботы
10:39
В японской лунной миссии впервые успешно задействованы «прыгающие» компактные автономные роботы
Япония стала пятой страной в мире, чья автоматическая межпланетная интеллектуальная станция SLIM, разработанная Японским агентством аэрокосмических исследований (JAXA), 20 января этого года совершила мягкую посадку на поверхность Луны. Правда, модуль прилунился «вверх ногами», но в остальном миссию можно считать удачной, посадка получилась мягкой даже в таком положении. В задачи платформы входило осуществление посадки с высокой точностью до 100 метров, что SLIM и выполнил успешно. Для сравнения, точность посадки лунного модуля «Аполлон 11» составляла около 20 километров.Помимо высокоточного прилунения в заданной точке, в японской лунной миссии впервые задействованы и другие ноу-хау. Перед самым прилунением посадочный аппарат SLIM на высоте пять метров покинули, буквально выпрыгнули, два автономных компактных модуля LEV-1 и LEV-2 размером с бейсбольный и баскетбольный мячи соответственно. Эти аппараты, оснащенные в верхней части выдвижными камерами высокого разрешения, и зафиксировали посадку SLIM, кадры были переданы на Землю.
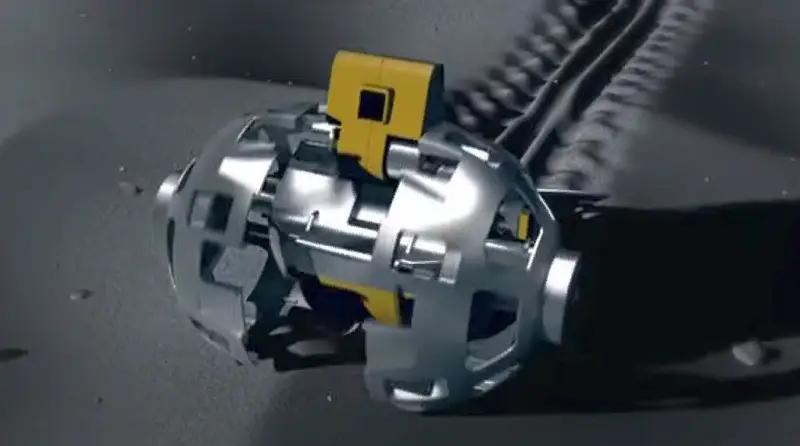
Особенностью компактных роботов, изготовленных в японской компании Tomy Co, является их способ передвижения по поверхности. Центральная часть каждого аппарата после посадки раздвигается для перемещения на двух колесах. Кроме того, роботы, оснащенные специальной системой пружин, способны совершать прыжки для преодоления различных препятствий, таких как крупные камни. Согласно переданным данным, LEV-1 совершил шесть прыжков, что делает его первым роботом, способным перемещаться таким способом по любому внеземному телу.Кроме того, LEV-2 диаметром всего восемь сантиметров оказался самым маленьким и легким аппаратом, который работал на Луне. При этом была успешно протестирована и возможность передачи данных между роботами. Это был первый случай, когда полностью автономные транспортные средства были задействованы в исследованиях Луны без помощи с Земли. В настоящее время аккумуляторы LEV-1 и LEV-2 уже разрядились, что привело к завершению их миссий. В Японском агентстве аэрокосмических исследований продолжают анализ данных, отправленных зондами.Еще более любопытна история разработки и создания этих роботов. Идею придумал и реализовал профессор инженерного дела Университета Дошиша Кимитака Ватанабэ, который до 2020 года был сотрудником ведущего японского производителя игрушек компании Tomy Co. Он в полной мере использовал технологии трансформации игрушек и другие навыки для космической программы. Это позволило при проектировании и изготовлении роботов реализовать простой и одновременно инновационный дизайн и конструкцию зондов.Поверхность Луны покрыта слоем песка, известного как реголит. Кроме того, на поверхности спутника Земли есть крутые склоны с более слабой гравитацией, чем на Земле. Ключом к решению проблемы передвижения в таких условиях послужил способ, которым недавно вылупившиеся морские черепахи взбираются по наклонным песчаным пляжам.Они (черепашки) лежат ровно и ползают. Я подумал, как воспроизвести эту методологию с колесами — приводит слова профессора японская национальная газета «Асахи симбун» (Asahi Shimbun).Идея, к которой пришел Ватанабэ, заключалась в том, что центр тяжести вращающихся колес должен быть немного смещен от центральной части. В результате зонды LEV были сконструированы так, чтобы медленно, но стабильно продвигаться вперед даже на 30-градусных склонах. Создатель оригинальных роботов лично наблюдал за посадкой SLIM. После того, как оба зонда продемонстрировали успешную работу, Ватанабэ заявил, что почти на 100 процентов удовлетворен результатом, пишет «Асахи симбун».
 Япония стала пятой страной в мире, чья автоматическая межпланетная интеллектуальная станция SLIM, разработанная Японским агентством аэрокосмических исследований (JAXA), 20 января этого года совершила мягкую посадку на поверхность Луны. Правда, модуль прилунился «вверх ногами», но в остальном миссию можно считать удачной, посадка получилась мягкой даже в таком положении. В задачи платформы входило осуществление посадки с высокой точностью до 100 метров, что SLIM и выполнил успешно. Для сравнения, точность посадки лунного модуля «Аполлон 11» составляла около 20 километров.Помимо высокоточного прилунения в заданной точке, в японской лунной миссии впервые задействованы и другие ноу-хау. Перед самым прилунением посадочный аппарат SLIM на высоте пять метров покинули, буквально выпрыгнули, два автономных компактных модуля LEV-1 и LEV-2 размером с бейсбольный и баскетбольный мячи соответственно. Эти аппараты, оснащенные в верхней части выдвижными камерами высокого разрешения, и зафиксировали посадку SLIM, кадры были переданы на Землю.
Япония стала пятой страной в мире, чья автоматическая межпланетная интеллектуальная станция SLIM, разработанная Японским агентством аэрокосмических исследований (JAXA), 20 января этого года совершила мягкую посадку на поверхность Луны. Правда, модуль прилунился «вверх ногами», но в остальном миссию можно считать удачной, посадка получилась мягкой даже в таком положении. В задачи платформы входило осуществление посадки с высокой точностью до 100 метров, что SLIM и выполнил успешно. Для сравнения, точность посадки лунного модуля «Аполлон 11» составляла около 20 километров.Помимо высокоточного прилунения в заданной точке, в японской лунной миссии впервые задействованы и другие ноу-хау. Перед самым прилунением посадочный аппарат SLIM на высоте пять метров покинули, буквально выпрыгнули, два автономных компактных модуля LEV-1 и LEV-2 размером с бейсбольный и баскетбольный мячи соответственно. Эти аппараты, оснащенные в верхней части выдвижными камерами высокого разрешения, и зафиксировали посадку SLIM, кадры были переданы на Землю.
